Leyes de Newton
Las leyes de Newton, también conocidas como leyes del movimiento de Newton,1 son tres principios a partir de los cuales se explican la mayor parte de los problemas planteados por la mecánica, en particular, aquellos relativos al movimiento de los cuerpos. Revolucionaron los conceptos básicos de la física y el movimiento de los cuerpos en el universo.
Primera Ley de movimiento de Newton
Lo que establece la Primera ley de movimiento de Newton es lo siguiente:
En ausencia de fuerzas externas un objeto en reposo permanecerá en reposo y un objeto en movimiento continuará en movimiento a velocidad constante (esto es, con rapidez constante en línea recta).
Otra forma de establecer la misma premisa puede ser:
Todo objeto continuará en su estado de reposo o movimiento uniforme en línea recta a menos que sea obligado a cambiar ese estado debido a fuerzas que actúan sobre él.
Una explicación para esta ley es que establece que si la fuerza neta sobre un objeto es cero, si el objeto está en reposo, permanecerá en reposo y si está en movimiento permanecerá en movimiento en línea recta con velocidad constante.
Segunda Ley de Newton
La Segunda Ley de Newton establece lo siguiente:

Una buena explicación para misma es que establece que siempre que un cuerpo ejerce una fuerza sobre un segundo cuerpo, el segundo cuerpo ejerce una fuerza sobre el primero cuya magnitud es igual, pero en dirección contraria a la primera. También podemos decir que la segunda ley de Newton responde la pregunta de lo que le sucede a un objeto que tiene una fuerza resultante diferente de cero actuando sobre el.
La aceleración de un objeto es directamente proporcional a la fuerza neta que actúa sobre él e inversamente proporcional a su masa.
De esta forma podemos relacionar la fuerza y la masa de un objeto con el siguiente enunciado:
Una buena explicación para misma es que establece que siempre que un cuerpo ejerce una fuerza sobre un segundo cuerpo, el segundo cuerpo ejerce una fuerza sobre el primero cuya magnitud es igual, pero en dirección contraria a la primera. También podemos decir que la segunda ley de Newton responde la pregunta de lo que le sucede a un objeto que tiene una fuerza resultante diferente de cero actuando sobre el.
Fuerza
La fuerza es un concepto difícil de definir, pero muy conocido. Sin que nos digan lo que es la fuerza podemos intuir su significado a través de la experiencia diaria.
Una fuerza es algo que cuando actúa sobre un cuerpo, de cierta masa, le provoca un efecto.
Por ejemplo, al levantar pesas, al golpear una pelota con la cabeza o con el pie, al empujar algún cuerpo sólido, al tirar una locomotora de los vagones, al realizar un esfuerzo muscular al empujar algo, etcétera siempre hay un efecto.
El efecto de la aplicación de una fuerza sobre un objeto puede ser:
• modificación del estado de movimiento en que se encuentra el objeto que la recibe
• modificación de su aspecto físico
También pueden ocurrir los dos efectos en forma simultánea. Como sucede, por ejemplo, cuando alguien patea una lata de bebida: la lata puede adquirir movimiento y también puede deformarse.
EJEMPLO: mover objetos


Clasificación de las fuerzas:
Son fuerzas que están presentes en los cuerpos que intercaran sin necesidad de estar en contacto directo. por ejemplo las interacciones: generacionales (Interacción tierra-sol, sol-luna, atracción que ejerce la tierra sobre los cuerpos); eléctricas, magnéticas, etc.
Son las que no necesitan contacto para producir efecto. Entre ellas puedes citar: las generacionales, entre masas; las eléctricas, entre cargas eléctricas y las magnéticas entre polos magnéticas. En todas ellas, las fuerzas generacionales, eléctricas y magnéticas son inversas al cuadrado de la distancia que las separa y directamente proporcionales a las masas, cargas o polos, respectivamente.
-fuerza gravitacional a distancia.
- fuerza de atracción a distancia debido a la persona.

El principio de acción y reacción de Newton determina que entre dos cuerpos en contacto existe una fuerza de igual magnitud pero de sentido contrario actuando sobre cada uno.
Estas pueden clasificarse en fuerzas de contacto y fuerzas de acción a distancias según entren en contacto o no los cuerpos sobre los que intercaran. Las primeras son aquellas en las que los objetos se encuentran en contacto físico y la fuerza se ejerce sobre su superficie de modo perpendicular. Un ejemplo es la fuerza de fricción. En las de segundo tipo, en cambio, los objetos no están en contacto como, por ejemplo, en la fuerza magnética.
Un objeto sometido a dos fuerzas está físicamente en equilibrio cuando en el efecto producido ambas se anulan mutuamente. En estos casos, es llamada fuerza normal a la fuerza ejercida sobre un plano que se contrarresta con la fuerza peso. En otras palabras, aludimos con fuerza normal a la presión que se ejerce sobre un cuerpo en relación a su superficie y peso.
Teniendo un objeto X ubicado sobre una mesa, contemplamos sobre el mismo dos tipos de fuerzas en interacción según el principio de Newton. Por un lado, la masa de la Tierra y su fuerza gravitatoria sobre el cuerpo en cuestión. Por el otro, la fuerza de contacto del objeto contra la mesa produciendo una reacción normal en sentido opuesto.
Estas pueden clasificarse en fuerzas de contacto y fuerzas de acción a distancias según entren en contacto o no los cuerpos sobre los que intercaran. Las primeras son aquellas en las que los objetos se encuentran en contacto físico y la fuerza se ejerce sobre su superficie de modo perpendicular. Un ejemplo es la fuerza de fricción. En las de segundo tipo, en cambio, los objetos no están en contacto como, por ejemplo, en la fuerza magnética.
Un objeto sometido a dos fuerzas está físicamente en equilibrio cuando en el efecto producido ambas se anulan mutuamente. En estos casos, es llamada fuerza normal a la fuerza ejercida sobre un plano que se contrarresta con la fuerza peso. En otras palabras, aludimos con fuerza normal a la presión que se ejerce sobre un cuerpo en relación a su superficie y peso.
Teniendo un objeto X ubicado sobre una mesa, contemplamos sobre el mismo dos tipos de fuerzas en interacción según el principio de Newton. Por un lado, la masa de la Tierra y su fuerza gravitatoria sobre el cuerpo en cuestión. Por el otro, la fuerza de contacto del objeto contra la mesa produciendo una reacción normal en sentido opuesto.
Magnitudes
Las magnitudes son atributos con los que medimos determinadas propiedades físicas, por ejemplo una temperatura, una longitud, una fuerza, la corriente eléctrica, etc. Encontramos dos tipos de magnitudes, las escalares y las vectoriales.
Magnitudes escalares
Las magnitudes escalares tienen únicamente como variable a un número que representa una determinada cantidad. Por ejemplo la masa de un cuerpo, que se mide en Kilogramos.

Magnitudes vectoriales
En muchos casos las magnitudes escalares no dan información completa sobre una propiedad física. Por ejemplo una fuerza de determinado valor puede estar aplicada sobre un cuerpo en diferentes sentidos y direcciones. Tenemos entonces las magnitudes vectoriales que, como su nombre lo indica, se representan mediante vectores, es decir que además de un módulo (o valor absoluto) tienen una dirección y un sentido. Ejemplos de magnitudes vectoriales son la velocidad y la fuerza.

Según el modelo físico con el que estemos trabajando utilizamos vectores con diferente número de componentes. Los más comunes son los de una, dos y tres coordenadas que permiten indicar puntos en la recta, en el plano y en el espacio respectivamente.
En el apartado de matemática puedes consultar las operaciones con vectores más utilizadas (suma, resta, producto escalar, producto vectorial, etc).
Según el modelo físico con el que estemos trabajando utilizamos vectores con diferente número de componentes. Los más comunes son los de una, dos y tres coordenadas que permiten indicar puntos en la recta, en el plano y en el espacio respectivamente.
En el apartado de matemática puedes consultar las operaciones con vectores más utilizadas (suma, resta, producto escalar, producto vectorial, etc).
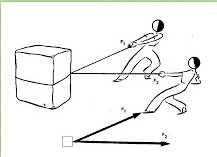
suponga una fuerza (cantidad vectorial) que mueve una caja grande arrastrándola por el suelo.
La caja se moverá más fácil si se hala por medio de una cuerda inclinada (como se muestra en la figura) que si se empuja, debido a que la cuerda levanta la caja y la mueve hacia adelante al mismo tiempo.
En forma similar, al empujar la caja, se produce el efecto de añadir peso. Esto da la idea de que una fuerza, y en general, un vector, tiene componentes verticales y horizontales que podrían reemplazar al vector.

Las magnitudes de las componentes se encuentran relacionadas con la magnitud del vector principal por medio del teorema de pitágoras, tomando como catetos las componentes, y como hipotenusa el vector principal.
La dirección del vector principal relaciona también a las magnitudes de las componentes por medio de las relaciones trigonométricas conocidas para un triángulo rectángulo simple. Las relaciones más utilizadas son el seno, coseno y tangente.
Ejemplo. Encuentre la magnitud de las componentes en x e y del vector (3.5 u,60º).

La componente en x se puede encontrar fácilmente utilizando la relación del cosena:

Resolviendo: Componente en x = (3.5 u)*cos(60º) = 1.75 u.
De manera similar, se puede encontrar la magnitud de la componente en y por medio de la relación del seno; pero además se conoce la magnitud del vector principal, lo cual permite utilizar el teorema de pitágoras:

Resolviendo:

Componente en y = 3.03 u
En general, las componentes de un vector pueden verse como efectos o proyecciones a lo largo de los ejes x e y. Considere el vector V. Podemos escribir las componentes en x e y del vector V en términos de su magnitud V y su dirección θ:
- Componente en x, o Vx = V cos θ
- Componente en y, o Vy = V sen θ
donde θ es el ángulo, medido en dirección anti horaria, entre el vector V y el lado positivo del eje x.
Condiciones de equilibrio
Las condiciones de equilibrio son las leyes que rigen la estática. La estática es la ciencia que estudia las fuerzas que se aplican a un cuerpo para describir un sistema en equilibrio. Diremos que un sistema está en equilibrio cuando los cuerpos que lo forman están en reposo, es decir, sin movimiento. Las fuerzas que se aplican sobre un cuerpo pueden ser de tres formas:
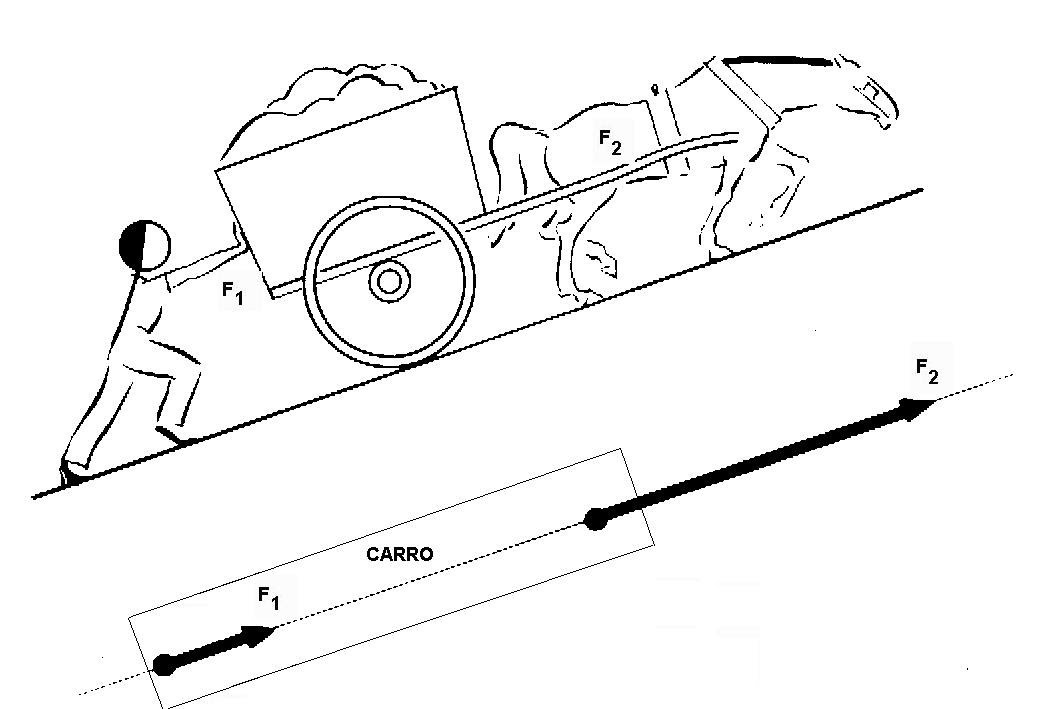
-Fuerzas angulares: Dos fuerzas se dice que son angulares, cuando actúan sobre un mismo punto formando un ángulo.

-Fuerzas colineales: Dos fuerzas son colineales cuando la recta de acción es la misma, aunque las fuerzas pueden estar en la misma dirección o en direcciones opuestas.

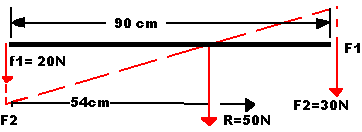
-Fuerzas paralelas: Dos fuerzas son paralelas cuando sus direcciones son paralelas, es decir, las rectas de acción son paralelas, pudiendo también aplicarse en la misma dirección o en sentido contrario.

A nuestro alrededor podemos encontrar numerosos cuerpos que se encuentran en equilibrio. La explicación física para que esto ocurra se debe a las condiciones de equilibrio:




-Fuerzas angulares: Dos fuerzas se dice que son angulares, cuando actúan sobre un mismo punto formando un ángulo.
-Fuerzas colineales: Dos fuerzas son colineales cuando la recta de acción es la misma, aunque las fuerzas pueden estar en la misma dirección o en direcciones opuestas.
-Fuerzas paralelas: Dos fuerzas son paralelas cuando sus direcciones son paralelas, es decir, las rectas de acción son paralelas, pudiendo también aplicarse en la misma dirección o en sentido contrario.
A nuestro alrededor podemos encontrar numerosos cuerpos que se encuentran en equilibrio. La explicación física para que esto ocurra se debe a las condiciones de equilibrio:
Primera condición de equilibrio: Diremos que un cuerpo se encuentra en equilibrio de traslación cuando la fuerza resultante de todas las fuerzas que actúan sobre él es nula: ∑ F = 0.
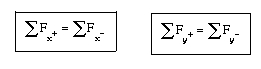
Desde el punto de vista matemático, en el caso de fuerzas coplanarias, se tiene que cumplir que la suma aritmética de las fuerzas o de sus componentes que están el la dirección positiva del eje X sea igual a las componentes de las que están en la dirección negativa. De forma análoga, la suma aritmética de las componentes que están en la dirección positiva del eje Y tiene que ser igual a las componentes que se encuentran en la dirección negativa:

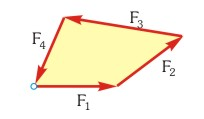
Por otro lado, desde el punto de vista geométrico, se tiene que cumplir que las fuerzas que actúan sobre un cuerpo en equilibrio tienen un gráfico con forma de polígono cerrado; ya que en el gráfico de las fuerzas, el origen de cada fuerza se representa a partir del extremo de la fuerza anterior, tal y como podemos observar en la siguiente imagen.

El hecho de que su gráfico corresponda a un polígono cerrado verifica que la fuerza resultante sea nula, ya que el origen de la primera fuerza (F1) coincide con el extremo de la última (F4).
Desde el punto de vista matemático, en el caso de fuerzas coplanarias, se tiene que cumplir que la suma aritmética de las fuerzas o de sus componentes que están el la dirección positiva del eje X sea igual a las componentes de las que están en la dirección negativa. De forma análoga, la suma aritmética de las componentes que están en la dirección positiva del eje Y tiene que ser igual a las componentes que se encuentran en la dirección negativa:
Por otro lado, desde el punto de vista geométrico, se tiene que cumplir que las fuerzas que actúan sobre un cuerpo en equilibrio tienen un gráfico con forma de polígono cerrado; ya que en el gráfico de las fuerzas, el origen de cada fuerza se representa a partir del extremo de la fuerza anterior, tal y como podemos observar en la siguiente imagen.
El hecho de que su gráfico corresponda a un polígono cerrado verifica que la fuerza resultante sea nula, ya que el origen de la primera fuerza (F1) coincide con el extremo de la última (F4).
-Segunda condición de equilibrio: Por otro lado, diremos que un cuerpo está en equilibrio de rotación cuando la suma de todas las fuerzas que se ejercen en él respecto a cualquier punto es nula. O dicho de otro modo, cuando la suma de los momentos de torsión es cero.

En este caso, desde el punto de vista matemático, y en el caso anterior en el que las fuerzas son coplanarias; se tiene que cumplir que la suma de los momentos o fuerzas asociados a las rotaciones antihorarias (en el sentido contrario de las agujas del reloj), tiene que ser igual a la suma aritmética de los momentos o fuerzas que están asociados a las rotaciones horarias (en el sentido de las agujas del reloj):
En este caso, desde el punto de vista matemático, y en el caso anterior en el que las fuerzas son coplanarias; se tiene que cumplir que la suma de los momentos o fuerzas asociados a las rotaciones antihorarias (en el sentido contrario de las agujas del reloj), tiene que ser igual a la suma aritmética de los momentos o fuerzas que están asociados a las rotaciones horarias (en el sentido de las agujas del reloj):
Un cuerpo se encuentra en equilibrio traslacional y rotacional cuando se verifiquen de forma simultánea las dos condiciones de equilibrio. Estas condiciones de equilibrio se convierten, gracias al álgebra vectorial, en un sistema de ecuaciones cuya solución será la solución de la condición del equilibrio.
Para sumar dos vectores libres  y
y  se escogen como representantes dos vectores tales que el extremode uno coincida con el origen del otro vector
se escogen como representantes dos vectores tales que el extremode uno coincida con el origen del otro vector
Regla del paralelogramo
Se toman como representantes dos vectores con el origen en común, se trazan rectas paralelas a los vectores obteniéndose un paralelogramocuya diagonal coincide con la suma de los vectores.
Para sumar dos vectores se suman sus respectivas componentes.

















No hay comentarios:
Publicar un comentario